Road Simulation is an ADVANCED mode, which is more intended for WLTP cycle, than for testing. Indeed Road Simulation is a kind of modified RAMP which uses a mathematical model to simulate what the vehicle should do in the road according to the instant output the vehicle performs
Users that want to use Road Simulation because they didn’t configure the Ramp correctly will not have a better response with Road Simulation because it is indeed a more complex mode and needs more configuration
Road simulation is easier to be used in rolling road dynos and hub dynos (with automatic gearbox vehicles) than with engine dynos due to the lack of inertia of engine dynos.
Road Simulation is based on three coefficients (C, B, A) to simulate the road and wind-drag load, and a weight value to simulate the inertia of the vehicle.
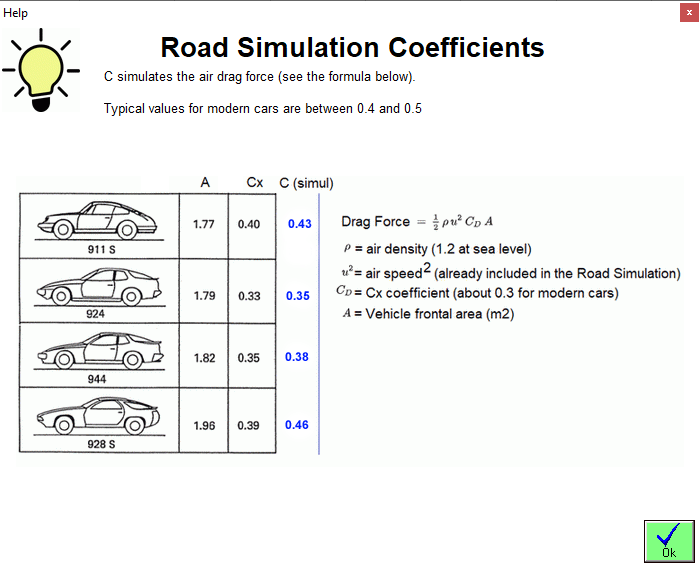
C is the square term of the polynom and simulates mainly the air force which increases as a square function with speed. Please note that C is not the vehicle’s Cx, but A (frontal surface) by Cx by other constants (see the formula below)
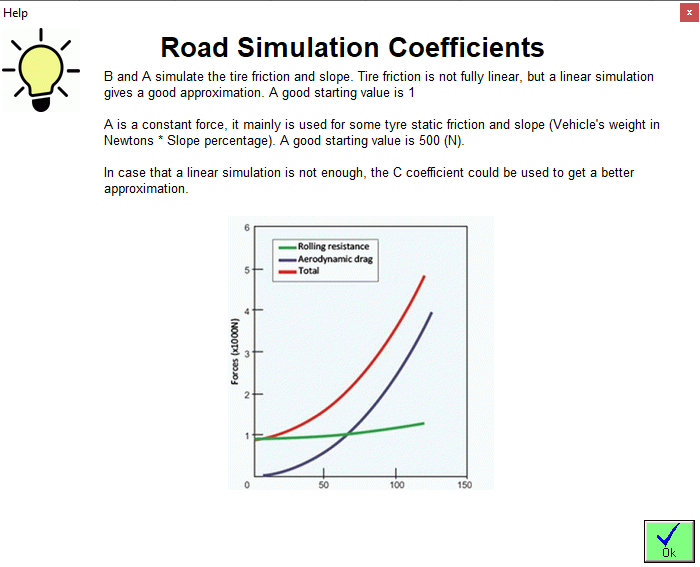
B and A are the linear and constant coefficients in the polynom which mainly simulate the tire friction and slope
Finally the simulated mass is the vehicle’s mass. If the value entered in this field is lower than the equivalent mass of the dyno the simulation will be performed with the dyno equivalent mass, as there is no way (with braked dynos) to accelerate the vehicle to simulate a lower mass (only dynos with electric motors may reach this feature)
It is not a simple task to configure it. You can start with C=0.40, B=1, A=0 and perform several tests. The goal is that the top speed is the same in the dyno as in the road, and that acceleration times are the same. There are advanced procedures to measure those coefficients, but it is not the purpose of this brief explanation.
Additionally there are other coefficients to improve the Road Simulation

Max acceleration (roller), if it is higher than 0, it limits the maximum acceleration to avoid unexpected behaviour on low inertia dynos
Road Simulation PID: it provides an alternative PID to the main PID used for Steady and Ramp modes, as normally we need a more reactive PID (higher KP, about +50% than the normal KP) in order to provide a better speed tracking in the Road Simulation mode, as the priority is the speed profile, not the power measurement
As alternatives to Ramp and R/S modes (if the PID does not provide the desired results) the user can use the Fixed Brake or Brake Map modes, but they only will work correctly on high inertia dynos (rolling road dynos) as the residual torque (engine torque – brake torque) is very critical on low inertia dynos (hub dynos and engine dynos). In this case only PID modes should be used. A special exception to this case is when testing electric motors in a “reverse test mode” as the motor starts from top speed, then the brake increases its torque progressively until the motor stalls, the motor normally is very stable during all the process regardless the dyno inertia because the motor torque map normally is decreasing with speed, but this does not apply to normal ICE engines because once the TQ peak is reached (say 2000 rpm at a diesel engine) the engine becomes totally unstable and stalls.